정속주행장치(Cruise Control System)가 속력 유지만을 위해 만들어진 장치라면, 적응형 정속주행장치(Adaptive Cruise Control System, ACC)는 속력 유지 뿐만 아니라 앞 차량과의 간격도 유지를 시켜주는 장치이다.
ACC는 지정속도로 주행하는 속도제어(크루즈 컨트롤 모드) + 차간 간격 유지모드(어댑티브 크루즈 컨트롤 모드) 두가지 기능을 모두 가진다. 내 차보다 느린 전방 차량을 감지하면 안전 거리 유지를 위한 속도를 제어하고, 전방 차량이 사라지면 초기 사용자 지정 속도로 다시 주행하게 된다.
시스템 구성
- 운전자(Driver): ACC를 On/off 하며 속도와 목표 거리를 설정한다.
- 센서(RADAR): 앞 차량을 감지하고 상대 거리와 상대 속도를 감지한다.
- 제어기(Controller): 센서로부터 받은 정보를 통해 앞 차량과의 거리를 일정하게 유지할 수 있도록 엔진, 변속기, 브레이크로 신호를 보낸다.
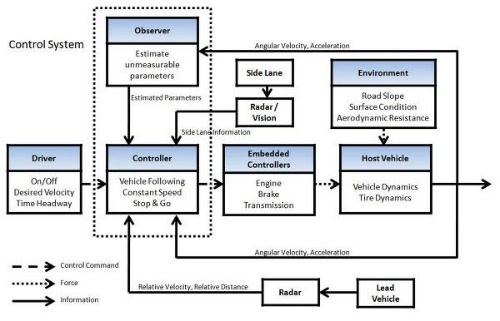
작동원리
차량이 ACC 시스템에 의해 정해진 속도로 주행하다가 앞 차량이 감지되면 앞 차량과의 상대거리를 RADAR 센서를 통해 피드백 받아 지정된 목표거리와의 오차 계산 및 제어(브레이크 사용)를 실시한다. LiDAR 카메라 센서를 통해 좀 더 정확한 값을 측정하고, 목표거리 - 상대거리 = 차이 비교로 제어 명령을 만든다.
거리 조절 스위치로 앞 차량과의 거리를 조절할 수 있는데, 목표 거리는 차량의 속도에 따라서 시간 간격으로 설정된다. 70km로 달릴 때와 120km로 달릴 때의 제동거리 안전거리가 다르므로 같은 단계로 설정하더라도 차량 속도에 따라 앞 차량과의 거리는 다르다.
예) 1단계: 1초 동안 가는 거리, 2단계: 2초 동안 가는 거리, 3단계: 3초 동안 가는 거리
70km/h 로 달릴 때 1단계는 19.4m / 2단계는 38.8m / 3단계는 58.2m
120km/h로 달릴 때 1단계는 33.3m / 2단계는 66.6m / 3단계는 100m
ACC의 응용
1) 네비게이션 연동하여 현재 지역의 제한속도 정보를 획득하고 이에 맞게 속도를 알아서 조절해준다. 운전자는 ACC 모드로 주행 시 제한 속도 구간을 따로 신경쓰지 않아도 된다
2) 곡선로 보조 기능은 도로 곡률을 계산해서 곡선 회전반경을 미리 계산하여 목표 속도를 설정한다. 급커브 구간에서 차량을 알아서 감속시켜 안전하게 주행할 수 있도록 도와준다.
내비게이션 + 곡선로 보조가 합쳐져서 램프 진출입 등에서 활용 가능하다. 정확한 진출입로 위치, 도로의 곡률 등 판단을 위해 GPS, 전측방, 후측방 RADAR 등 추가 센서 필요하다.
관련문항: (차량기술사 2021년 125회차 3교시 4번 문제)
적응형 정속주행장치(adaptive cruise control system)의 개념과 시스템 구성, 작동원리, 제어특성에 대하여 설명하시오.
'자동차 > 자율주행) ADAS, 제어' 카테고리의 다른 글
| 자율주행 5단계 (1) | 2023.11.29 |
|---|---|
| 스마트 크루즈 컨트롤(SCC) & 어드밴스트 스마트 크루즈 컨트롤(ASCC) (2) | 2023.03.04 |
| ADAS(첨단 운전자 지원 시스템)의 주요 시스템 (0) | 2023.02.26 |
| 능동안전시스템_액티브 후드 시스템, 자동긴급제동장치, 차선유지보조시스템 (0) | 2023.01.14 |
| 자율주행자동차에서 V2X 통신기술의 필요성과 V2X 기술 유형 4가지 (0) | 2022.11.17 |




댓글